.fb-comments,.fb-comments span,.fb-comments span iframe[style]{min-width:100%!important;width:100%!重要}
ロボットの存在は 80 年代の SF フリックで予測されたほど典型的ではありませんが、ロボットはますます私たちの日常生活に組み込まれてきています。住宅のほこりを処理するロボット掃除機から、タフなパルクールを実行するヒューマノイドまで、ロボットの進歩は、いくつかのドメインで観察できます。それでもなお、存在感が増したにもかかわらず、ロボットは製造コストが高く、ほとんどの状況で壊れやすく、さらに重要なことに、独自の環境に適応するための教育が難しい.
ロボットは、強力な知覚能力を備えています。つまり、知識があり、周囲のあらゆる環境で仕事をしているということです。ロボット掃除機を受け取ったと想像してください。最初に目にするのは、ロボットが適切に動作できるように、製造施設のテスト ルームと同様に住宅のレイアウトを変更することです。これは煩わしく、ほぼ間違いなくすぐに商品を返品することになります.このような制限を克服するには、ロボットを実際に効果的に教育する必要があります。
身体の世界でロボットに独特の環境を紹介するように指示することは可能ですが、多くの欠点があります。一方では、ロジスティクスの配置と損傷したロボットの交換には費用がかかります。一方、マスタリング速度はリアルタイムに制限され、ロジスティック料金は並行スクーリングで著しく改善されます。したがって、シミュレーションでの理解の人気のレベルは増幅され、積極的な主題であり続けています。
シミュレーションでの教育に到達したときに対処すべき最も重要な問題は、シミュレーションから本物の世界への一般化です。.言い換えれば、シミュレーションの物理学が実際の惑星を模倣するのに十分であり、ビジュアルがフォトリアリスティックとして認識されるのに十分優れていることを確認する方法. To handle these thoughts, Stanford and UC Berkeley scientists have proposed Gibson Setting, a perceptual and physics simulation.
 出典: https://openaccess.thecvf.com/information_cvpr_2018/papers/Xia_Gibson_Env_Actual-Planet_CVPR_2018_paper.pdf
出典: https://openaccess.thecvf.com/information_cvpr_2018/papers/Xia_Gibson_Env_Actual-Planet_CVPR_2018_paper.pdf
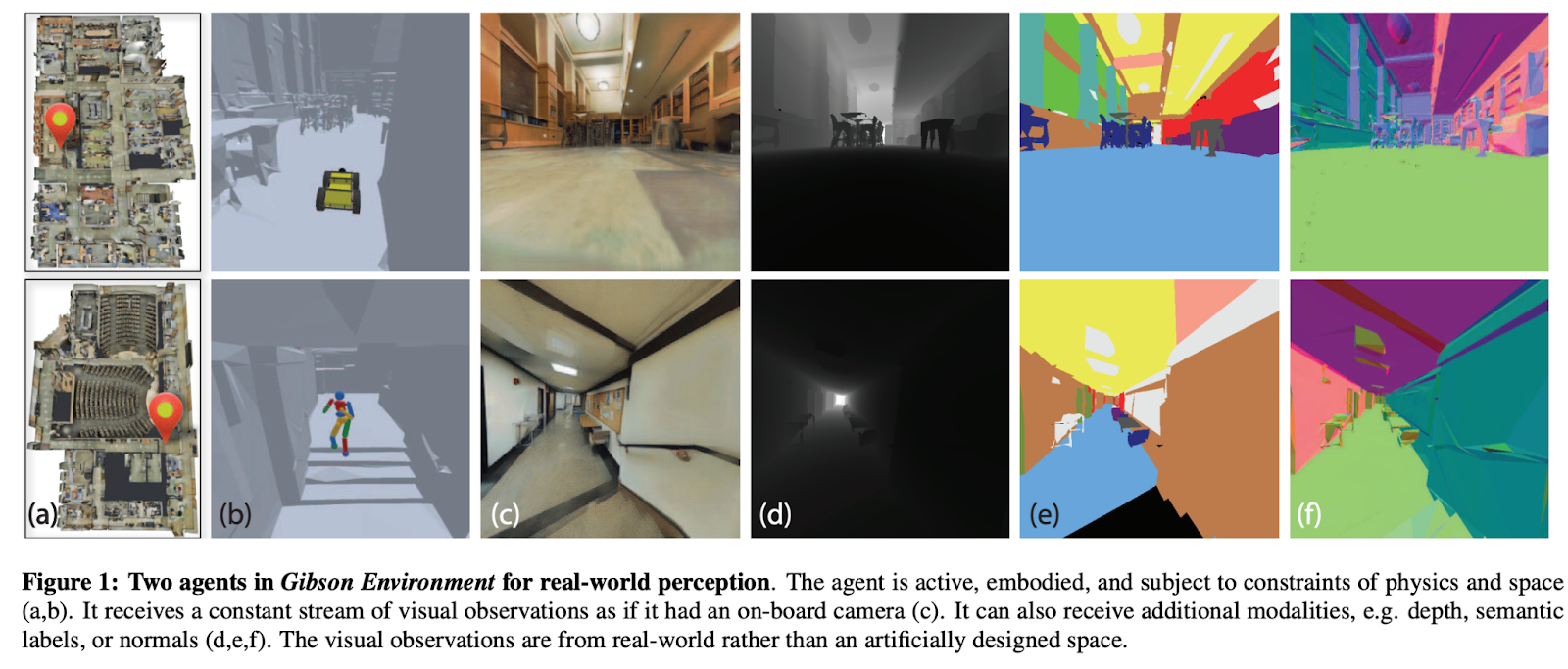
Ecological Technique to Visual Perception の作成者である James J. Gibson にちなんで命名された Gibson Environment は、実際の地球の実際の物理的および視覚的な家を等しく模倣できるシミュレーション。ギブソンは、真の惑星の知覚エージェントをトレーニングおよびテストするために利用できます。任意のエージェント、自動車またはヒューマノイドを、エージェントが実際の物理的な体格に含まれ、本物の領域の多くのセットに配置されているシミュレーションにインポートすることが可能です。この封じ込めは、あたかもエージェントにオンボード カメラがあるかのように、新しいレンダリング モーターのおかげで、本物の写真のようにリアルなビジュアル ストリームを提供します。さらに、実際の惑星にいるかのように、衝突や重力などの実際の物理的制約もエージェントに課します。
Gibson は、実際の地球でのシミュレーションで認定されたエージェントの効率を保護するために作られています。これは、シミュレーション環境でビジュアルを開発する場合でも利用される新しい技術によって達成されます。第 1 に、自然環境は、人工的なものではなく、ほとんどスキャンされた本物の領域に基づいて作成されます。次に、メカニズムがシミュレーションに統合され、Gibson のレンダリングと真のデジカメ撮影の違いが解消されます。これら 2 つのメカニズムにより、深刻な環境のデジタル カメラとギブソン ビジュアル レンダラーからのイラストや写真がエージェントにとって統計的に区別できないことが保証されます。 Gibson で学んだナビゲーション、階段の上り下りが効率的に実際の環境に反映されていました。これは非常に注目に値する有望なものですが、著者が分析の最後で説明しているように、Gibson は現在でも対応に限界があります (たとえば、動的に記述されたコンテンツのように、これらの種類の移動オブジェクトとして、シミュレーションでの操作を可能にするなど)。
この記事は、探査論文「Gibson Env: 身体化されたエージェントのための本物の環境認識‘.この研究のすべての信用格付けは、このプロジェクトの科学者に与えられます。 論文、github バックリンクとプロジェクト接続。 私たちの ML Subreddit に参加することを本当に無視しないでください
Ekrem Çetinkaya彼の学士号を取得しました。 2018年に修士号を取得。 2019年、トルコのイスタンブールにあるOzyegin Collegeから卒業。彼は修士号を書きました。深い畳み込みネットワークを使用したインプレッションのノイズ除去に関する論文。彼は現在博士号を取得しようとしています。オーストリアのクラーゲンフルト大学で学位を取得し、ATHENA プロジェクトの研究者として活動しています。彼の調査対象は、ディープ マスタリング、PC 視力、マルチメディア ネットワーキングです。
この投稿を評価してください
共有は思いやりです!

