Social media-gigant Facebook zojuist aangekondigd Habitat 2.0, het verbeterde simulatieplatform waarmee onderzoekers robots in virtuele omgevingen kunnen trainen. De stap voorwaarts van het bedrijf hier brengt het dichter bij het bereiken van’belichaamde AI’of de technologie waarmee robots alledaagse taken kunnen uitvoeren.
Habitat 2.0 is de nieuwere versie van het oorspronkelijke Habitat-platform van Facebook. En net als zijn voorganger laat 2.0 onderzoekers hun training snel voltooien, terwijl ze alle details op hoog niveau weergeven die nodig zijn om de robots grondig te trainen. Deze details omvatten objecten en obstakels die robots kunnen tegenkomen in huishoudelijke omgevingen, zoals werkbladen, stoelen, speelgoed en dozen, en om in gezelschap van mensen door echte ruimtes te kunnen navigeren.
Uiteindelijk zou dit kunnen betekenen dat dergelijke robots eenvoudiger commando’s aankunnen, zoals’laad de vaatwasser’of’haal een frisdrank uit de koelkast’. De implicaties zijn echter veel groter, omdat ze mogelijk ook mensen met een visuele beperking kunnen helpen maak een blokje om terwijl je obstakels herkent en de gebruiker helpt deze te vermijden. p>
Vergeleken met fysieke training bespaart virtuele training zowel tijd als geld en is het toegankelijker voor diegenen die er gebruik van willen maken. Facebook hoopt dat Habitat het gemakkelijker zal maken om snel ondersteunende robots te trainen, vooral robots die ontworpen zijn om saaie huishoudelijke taken aan te pakken (ik neem er twee, bedankt!).
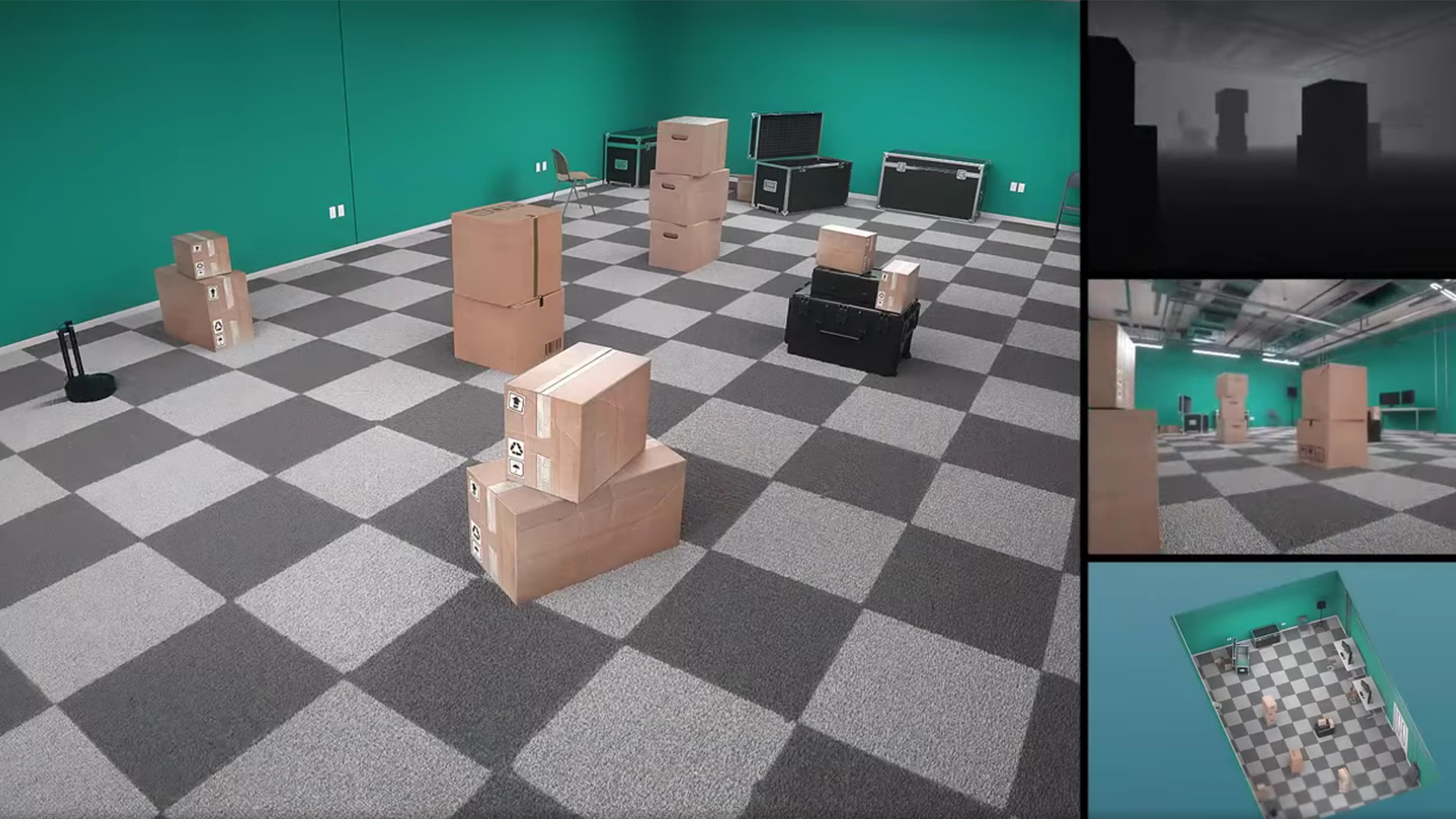
Om succesvol te zijn, moeten de robots echter eerst leren navigeren op verschillende oppervlakken, kamerindelingen en andere elementen die de echte omgevingen goed nabootsen. Dat is echter precies waar Habitat 2.0 van pas komt. Het kan deze robots snel trainen in allerlei omgevingen (zoals huizen met meerdere verdiepingen en vergaderruimtes op kantoor), rekening houdend met tal van obstakels en andere variabelen, in plaats van maanden of jaren door te brengen door ze in het echte leven huis na huis te laten rondzwerven.
Habitat 2.0 traint ook tegen een andere zware uitdaging: interactie met objecten. Eerdere platforms, zoals Replica, gebruikten statische datasets die dit niet toestonden, ondanks dat het een belangrijk onderdeel van de training was. Maar met 2.0 kunnen robots nu’oefenen’om over tapijt te rollen, borstels te pakken, enzovoort.
Dhruv Batra, onderzoekswetenschappers bij Facebook, verklaarde:”Met deze nieuwe dataset en platform kunnen AI-onderzoekers verder gaan dan alleen het bouwen van virtuele agenten in statische 3D-omgevingen en dichter bij het creëren van robots komen die gemakkelijk en betrouwbaar kunnen presteren nuttige taken zoals het vullen van de koelkast, het vullen van de vaatwasser of het op commando ophalen van voorwerpen en ze terugbrengen naar hun gebruikelijke plaats.”
Replica is ook geüpgraded naar ReplicaCAD. De bescheiden bibliotheek van 18 3D-scans werd uitgebreid tot meer dan 110 indelingen van woonruimtes en omvat bijna 100 objecten; het kan ook realistische rommel toevoegen en de robots in staat stellen om te”interactie”met deuren en andere elementen.
Het platform is ook meerdere orden van grootte sneller dan de meeste andere 3D-simulators die er zijn. Waar andere platforms alleen een ondersteunende robot kunnen simuleren die interactie heeft met 400 stappen per seconde (SPS), kan ReplicaCAD gemakkelijk 1200 SPS aan (met een maximum van 26.000 met extra GPU’s). Het zal interessant zijn om te zien hoe de training uiteindelijk verloopt en of we ooit ondersteunende robots op consumentenniveau krijgen om huishoudelijke taken uit te voeren.
Bron: Facebook