
ソーシャルメディアの巨人Facebook 発表されたばかり Habitat 2.0、研究者が仮想環境でロボットを訓練できるようにするアップグレードされたシミュレーションプラットフォーム。ここでの同社の前進は、「具体化されたAI」、つまりロボットが日常のタスクを実行できるようにする可能性のある技術の実現に近づいています。
Habitat 2.0は、Facebookの元のHabitatプラットフォームの新しいバージョンです。また、前モデルと同様に、2.0を使用すると、研究者はロボットを徹底的にトレーニングするために必要なすべての高レベルの詳細をレンダリングしながら、トレーニングを迅速に完了することができます。これらの詳細には、カウンタートップ、椅子、おもちゃ、箱などの家庭環境でロボットが遭遇する可能性のあるオブジェクトや障害物が含まれ、人間と一緒に現実世界の空間をナビゲートできるようになります。
最終的に、これは、そのようなロボットが「食器洗い機をロードする」や「冷蔵庫から炭酸飲料を取り出す」などのより単純なコマンドを処理できることを意味する可能性があります。ただし、視覚障害のある人にも役立つ可能性があるため、その影響ははるかに大きくなります。 ブロックの周りを散歩 しながら、障害物を認識し、ユーザーが障害物を回避できるようにします。
物理トレーニングと比較して、仮想トレーニングは時間とお金の両方を節約し、それを利用したい人がより広くアクセスできるようになります。 Facebookは、Habitatによって、特に退屈な家事に取り組むように設計された支援ロボットをすばやく簡単にトレーニングできるようになることを望んでいます(2つ取っていただき、ありがとうございます)。
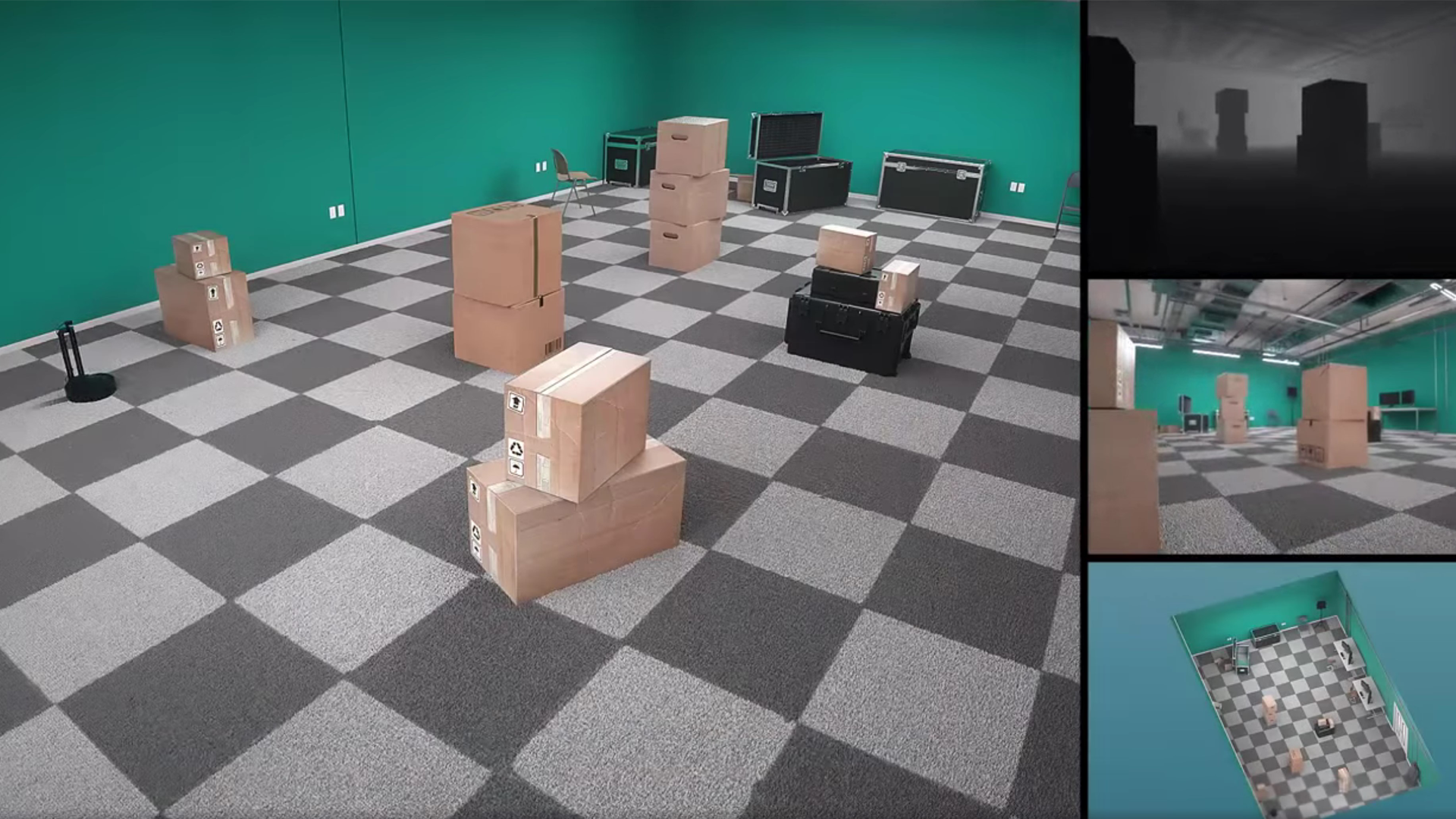
ただし、成功するには、ロボットはまず、実際の環境を適切に模倣するさまざまなサーフェス、部屋のレイアウト、およびその他の要素をナビゲートする方法を学習する必要があります。ただし、Habitat2.0が役立つのはまさにそのためです。実生活で何ヶ月も何年もかけて家の中を歩き回る代わりに、さまざまな環境(高層住宅やオフィスの会議室など)でこれらのロボットをすばやくトレーニングして、障害物やその他の変数を大量に処理できます。
Habitat 2.0は、もう1つの難しい課題であるオブジェクトの相互作用に対するトレーニングも行っています。レプリカなどの以前のプラットフォームでは、トレーニングの重要な部分であるにもかかわらず、これを許可しない静的データセットを使用していました。しかし、2.0では、ロボットはカーペットの上を転がったり、ブラシをつかんだりするなどの「練習」ができるようになりました。
Facebookの研究科学者であるDhruvBatra氏は、次のように述べています。「この新しいデータセットとプラットフォームにより、AI研究者は、静的3D環境で仮想エージェントを構築するだけでなく、簡単かつ確実に実行できるロボットの作成に近づくことができます。冷蔵庫の備蓄、食器洗い機の装填、コマンドでオブジェクトを取得して通常の場所に戻すなどの便利なタスク。」
ReplicaもReplicaCADにアップグレードされました。 18の3Dスキャンの控えめなライブラリは110を超えるリビングエリアのレイアウトに拡張され、100近くのオブジェクトが含まれています。また、リアルなクラッターを追加し、ロボットがドアやその他の要素と「相互作用」できるようにします。
このプラットフォームは、他のほとんどの3Dシミュレーターよりも数桁高速です。他のプラットフォームが400ステップ/秒(SPS)で相互作用する支援ロボットしかシミュレートできない場合、ReplicaCADは1,200 SPSを簡単に処理します(追加のGPUで最大26,000)。トレーニングが最終的にどのように行われるか、そして消費者レベルの支援ロボットに家事を処理させることができるかどうかを確認するのは興味深いことです。
出典: Facebook
